HOME�ESITEMAP�E�T�C�g�}�b�v�@���ւ�胁���@�Z�p�m�[�g�ڎ�OP
�q����j�� �Z�p�m�[�g �����쐬 03/05/10
�C���Čf 04/07/25
���e�lj� 04/10/22
�@
�@
�P�@�V���N���i�C�Y�h �G���x�[�^�[���ĂȂɁH
�@
�s���J���Ԓn��UH-1H�����Ł@�@ELINT�l
���������
�V���N���i�C�Y�h��G���x�[�^�[
��������@
�@
�@�����āA�B��ڂ��������Ă�����̂Ƃ��Ď��̕���������܂����B
�q��Z�p�i���{�q��Z�p����s�j89�N3�����@���̐����m�[�g�@���R���s�@��
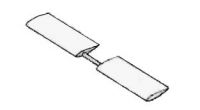
�@��������͕��ʤ��Ώ̗��^�ŁA�e�[���u�[����ʂ��Ď��t����ꤑO�i��s���A����ɍ�p����_�E�����[�h�ŋ@�̂̃��x����ێ�����B�܂��A����@�̂͐���������V���N���i�C�Y�h��G���x�[�^�[�����t���āi�x��47�̂悤�ɓƎ����V���N���i�C�Y�h��G���x�[�^�[��������̂�����j�A���e�d�S�ʒu�͈͂�傫�����Ă���B�O�i��s���ɐ���������̔�Ώ̃g���N�̂�����̂͐�������i�o�[�`�J���t�B���j�ŏ��������B
�@��������ƃt�B���͂Ƃ��ɗ��^�f�ʂ������藃�ŁA���Ε��ɂ��q��@�̎p���ω���h���A�q��@���Ό������ꍇ�A�@�̂����̎p���ɂ��ǂ��B�@��������ɂ��ẮA���e�d�S�ʒu�͈͂�傫������A���Ȃ킿�A�w���R�v�^�[���O�i����Ƃ��̑O�X�p���𐳏�Ȏp���ɐ��䂷�铭�������܂��B�A�G���X�p�V�A��AS350�̐�������̓}�C�i�X0.40���ɃZ�b�g����Ă��邻���ł��B
�@�������A�̐S���V���N���i�C�Y�h �G���x�[�^�[�ɂ��Ắ@�u�x���S�V�̂悤���Ǝ����v �@�Ƃ��������ĂȂ��ǂ����������肵�܂���B
�@�@�@�@�@�@�@�@
�Q�@�V���N���i�C�Y�h��G���x�[�^�[�Ƃ�
�x��UH-1B�^�@�㉺�Ώ̂̑w����
H�^�ȍ~�@��ʐ����̔�Ώ̗�
�@�V���N���i�C�Y�h �G���x�[�^�[��Ɠ������~�ǂł��B
�@���[�����[�^�[�̉H���̓R�b�N�s�b�g�̃T�C�N���b�N �s�b�` �X�e�B�b�N�i���c���j�̑���ɂ���āA�P��]����ԂɃs�b�`�p�̕ύX���s���A�O�i���ނ̗͂ݏo���܂��B ���̂Ƃ��ɕs�p�ȓ�������}������̂��V���N���i�C�Y�h �G���x�[�^�[�ł��B
�@���c����O�ɓ|���Ώ��~�ǂ̌㉏��������@��グ�A�����Ƌ@���ŁA���[�����[�^�[�̉�]�ʂ̓����ƘA�����܂��B
�@
����́A�ČR��UH-1N���V���N���i�C�Y�h �G���x�[�^�[�㉏�̂Ƃ���ɏ����Ă���\���ł��B
�@�ォ��A���E�m�[�Y�_�E���ʒu�A���c������t�Ɉ����������ʒu�A��t�ɉ������ʒu�̏��ɍ������x�b�g���ł��Ă���A�n��ł̓_���ɗp���Ă��܂��B
�i���㎩�q����UH-1�͂Ȃ������̕����������Ă���܂��j
�@
�@������UH-1N��^��납�猩��ƁA�킸���Ȃ���E�������ǂŌŒ肳��Ă��܂��B������s���̒����ɂ���āA���ꂪ�œK�Ƃ��ꂽ���̂Ǝv���A�����[���ł��B
�@2���̏��~�ǂ͐}�̂悤�Ƀg���N�`���[�u�P�{�Ōq�����Ă��܂��B����Ƀz�[�����t���Ă���Ƀ��b�h���P�{�q�����ăe�[���u�[���̒��𑖂��ăT�C�N���b�N�̃����N�Ɍq�����Ă��܂��B�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�ց@��
���������Q�G���W���^��UH-1N�ɐG�ꂽ�̂ŁA������Ɩʔ����Ǝv�����X���b�g�����Љ�Ă����܂��B�p�C���b�g������ő��삷��R���N�e�B�u�s�b�`���o�[�ɗւ�����Ă��܂��B
�@��̂��F�̔Z���̂����P�G���W���A�����̂�▾�邢�F�̂����Q�G���W���̃X���b�g���ŁA�\�ʂ̂����������㉺�ŕς��Ă���܂��B����ň����Ă����ƉĂ݂܂�������������Ƃ������G�育�����ł����B
��32-1�@HAWK����w�E�@�i03/05/12�j
�@�ǂ�ȋL���ɂȂ�̂����҂��Ă��܂����������[�����e�ł��ˁB������ӏ��C�ɂȂ鏊������܂��B�u�q��@�̎p���ω���h���A�q��@���ύX�����ꍇ�E�E�E�v�̈�߂ł�������́u�q��@���Ό������ꍇ�v�ł͂Ȃ��ł��傤���H�P�Ȃ�ϊ��~�X���Ǝv���܂����B�d���̋������悤�Ȏw�E�ŋ��k�ł��������A�Ӗ��������炵�Ă��ꂪ�������Ǝv���܂��B�@�@��������@�F�@���̂Ƃ���ł����B�d���̋��Ȃ�ĂƂ�ł��Ȃ��B���ׂȂ��Ƃł��~�X�͏C�����Ă����ׂ��ł��B���肪�Ƃ��������܂����B
�@
��32-�Q�@�ɂ����肳��w�E
����
������
���������
�V���N���i�C�Y�h��G���x�[�^�[
�c����
���������
�@���̕\�́u�������v�u�c�����v�͂悭�l����Ƃ��������ł��B�ʏ�q�R�[�L�ł̉������̓��[���ō��E�o���N�≡�]�������܂��B�c�̓s�b�`���O�ŋ@����グ���艺�����肷��^���������܂��B����ɐ����ɋ@��U��i�܂��͐K�U��j�����[�C���O�Ƃ����܂��B
�@����ł����ƃw���R�v�^�[�̐��������i�o�[�`�J���E�t�B���j�͉��Ƃ������̓��[�C���O�h�~�̂��߂��Ǝv���܂��B���p�L���ł́u��������͍q��@�̎p���ω���h���v�u�t�B���͍q��@�̕Ό���(�@������E�ɐU��Ό����j�v�Ƃ����Ӗ��ŕʂ̖����̂͂��ł��B
�@�w���R�v�^�[�̏ꍇ�̏c�͓��ɑO�i�ŋ@���p���ߓx�ɂ����Ȃ��悤�ɋ@��グ�̋t���[�����g�ɓ�����p��������悤�ɐ��������V���N���E�G���x�[�^�[�����Ă���ƍl���Ă��܂��B
�@�܂�w���R�v�^�[�̐�������A�V���N���E�G���x�[�^�[�́u�c�����v��p�Ő�������i�o�[�`�J���E�t�B���j�̓��[�C���O�h�~�ł���Ǝv���̂ł����E�E�B��������@�F�@���t���̂��Ƃ����ň��Ղɏ����Ă��܂��܂������A�����������Ȃ̂��Ƃł����B���̕������폜���܂����B
����
���������������
�V���N���i�C�Y�h��G���x�[�^�[
�c�������������
�@
��32-�R�@FA300����w�E�@
�@�@�u�^��납�猩��ƁA�킸���Ȃ��獶�E�̊p�x���Ⴂ�܂��B�����̕��G�Ȍ㗬�ɑΉ�����悤�ɃR���s���[�^�[���v�Z���ē������Ă�����̂Ǝv���܂��B�v�͊ԈႢ�ł��B
�@�m���ɐv�i�K�ł́@�R���s���[�^�[������܂����@���E�̃G���x�[�^�[�̓g���N�`���[�u�P�{�Ōq�����Ă��܂��@����Ɂ@�z�[�����t���Ă���Ƀ��b�h���P�{�q�����ăe�[���u�[���̒��𑖂��ăT�C�N���b�N�̃����N�Ɍq�����Ă��܂��B�����OH-1�������ł��
��������@�F�@���k�ł��B�u�^��납�猩��ƁA�킸���Ȃ���E�������ǂł��Œ肳��Ă��܂��B������s���̒����ɂ���āA���ꂪ�œK�Ƃ��ꂽ���̂Ǝv���A�����[���ł��B�v�Ƃ����L�q�ɉ��߂܂����B
��32-�S�@����T�ꂳ��ӌ�
�@�@�f�l�ł����A�����A�l�����q�ׂ����Ă��������B
�@�u���c����O�ɓ|���Ώ��~�ǂ̌㉏��������@��グ�A�����Ƌ@���ŁA���[�����[�^�[�̉�]�ʂ̓����ƘA�����܂��B�v
�@
�@�@�g�t�|�P�m������������t�L�����o�[�������Ă���̂́A�c�̐È�����Ƃ邽�߂��ƍl�����A�g�́i�܂��͐��́j�����ɂ��@�퉺�����[�����g��ł������i�c�̐È���𐳕����Ɂj���߂��Ǝv���܂��B�@�w���R�v�^�[�͏c�̐È��肪�u���i�܂��͂���ɋ߂��j�v�Ȃ̂ŁA�O���܂��͑��c���������ċ@��������悤�Ƃ���ƁA�����ł����������ɍ�p�����邱�Ƃ��]�܂����ł��B���̐��������́A���鑬�x��ł̂��ʂ����҂��Ă���̂��Ǝv���܂��B�P���ȁA���c���Ƃ̓����i�A���j�ł́u�V���N���i�C�Y�h�v�Ƃ����̂��傰���ł����A���c���Ƃ͋t�����̍�p���A���̗��R�ɂ͒Ⴂ�悤�ɍl���܂��B
�@�肪����ɂ́A�{�c�L�����́w�w���R�v�^�[����x������܂��B
�@���̂V�X�y�[�W�ɁA�u�x���Q�O�S�ł͑��c���̓����Ɣ�Ⴕ�Ȃ��悤�ɂ����v�Ƃ����ꕶ������܂��B���ꂪ��L���̂��̂��w���Ă���̂��A��L����߂����Ƃ��w���Ă���̂��͕s���Ȃ̂ł����B�@
��32-�T�@����T�ꂳ��ӌ��@
�@�@�V���N���i�C�Y�h�E�G���x�[�^�Ɋւ��āA�w�������m�̗F�l�Ɏ��₵�Ă݂܂����B���̉́A���̂Ƃ���ł��B
�@�V���N���i�C�Y�h�E�G���x�[�^�[�́A �T�C�N���b�N �X�e�B�b�N�ɘA�����܂��B
�����͂����ł��B
�@���c���i�T�C�N���b�N�X�e�B�b�N�j�������ʒu�ɂ����� �G���x�[�^�[�͂킸���Ƀm�[�Y�_�E���ɂ���܂��B ���̒����ʒu����X�e�B�b�N��O�A�ア����ɓ������Ă� �X�^�r���C�U�[�̓m�[�Y�A�b�v�����ɓ����悤�ł��B�@ �������쓮�ʂ͑O������ƌ������ňقȂ�܂��B
�@ �Ȃ����̂悤�ȓ��삪�K�v���Ɛ\���܂��ƁA�w���R�v�^�[�͔�s�@�ɔ�ׂ� �㏸��A�~���̍ۂ͂��Ƃ��Ƃ��܂�@�̎p�����ω����܂���B �Ƃ��낪���̃X�^�r���C�U�[�����邽�߂ɏ㏸�A�~���̍ۂɂ��̋�͍�p���� �@�̎p�����ω����Ă��܂��悤�ł��B
�@���̂悤�ȋ@�̂̎p���ω����C�����邽�߂Ƀp�C���b�g�͑��c�� �i�T�C�N���b�N�X�e�B�b�N�j��傫�����삷��K�v�������܂����A ���̑�����ŏ����ɂ��邽�߂́u���炭��v���V���N���i�C�Y�h�E�G���x�[�^�[�� �悤�ł��B
�@ ���Ȃ݂ɍł��d�v�Ȃ̂́A�I�[�g���[�e�[�V�����̏ꍇ�ɃX�^�r���C�U�[�����e�����y�ڂ����ƂŁA���̑X�^�r���C�U�[�ɋt�L�����o�[��t���邱�Ƃ̂悤�ł��B����ɏ㏸���̃X�g�[���h�~�̂��߂ɃX�|�C���[�i�t�g�|�P�a�j��O���X���b�g�i�a������222�C206�k�C�`�r332�j��t���Ă���@�킪����悤�ł��B
�@ ���̂悤�ȉ���ɔ��_����������������������邩������܂��A�����iRotor&Wing �ʍ�HELICOPTER AERODYNAMICS)���玄�����߂��������ł��B��������@�F�@���R���Ƃ��Ⴄ�悤�Ɋ������܂��B�܂�HU-1�̃X�^�r���C�U�[�̓��[�^�[�ɒ��p�Ɏ��t�����Ă���o�[�̖��̂ł����A���̕��̂����X�^�r���C�U�[�̓V���N���i�C�Y�h��G���x�[�^�[�Ȃ����͐�������̂��Ƃ��Ǝv���܂��B
�@
��32-6�@��������HU-1�n�w���R�v�^�[���c�̗����ɂ��ā@�i03/05/18�j
�@�T�C�N���b�N�@�s�b�`�@�X�e�B�b�N�ɘA���ȂǂƂ��炻���Ȃ��Ƃ������Ă��Ă��A�w���R�v�^�[�̑��c�𗝉����Ă��Ȃ��ł͖{���]�|�ł��B�Ƃ肠�����A����y�̋����Ɋ�Â��������������I���Ă����܂��B�w���R�v�^�[�̑��c
�@�w���R�v�^�[�̂Q�{�̃X�e�B�b�N�̖��O�Ƀq���g������܂��B
�@���ʂɂ����T�C�N���b�N�@�s�b�`�@�X�e�B�b�N�i�b���r�j�́A�T�C�N���i�����j�܂�u���[�h�̃s�b�`�p���P��]�̊ԂɎ����I�ɕς��Ă��܂��B
�@���葤�ɂ����R���N�e�B�u�@�s�b�`�@���o�[�i�b��L�j�́A�R���N�e�B�u�i���̓I�ȁj�܂�S���̃u���[�h�̃s�b�`�p���ɓ��ʕς��Ă��܂��B
�@��s���̎ʐ^�Ŋm�F����ƁA�u���[�h�̉�]�ʂ𐅕��������猩��Ƌt�~���`�ɂȂ��Ă��܂��B����̓u���[�h�̐��������ւ̉��S�͂Ɨg�͂̍��͂Ŋe�u���[�h�̐�[���ߏ���w���Ă��邩��ł��B
�@�^��ɏオ�鎞�́A�b��L�ŁA�e�u���[�h�̗g�͂��ő�ɂȂ�s�b�`�p�ɂ��Ă��܂��B�O�i�̎��́A�b���r�ŁA�u���[�h���O�ɗ������ɗg�͂�����悤�ɁA���̃u���[�h�̃s�b�`�p��ς��Ă��܂��B
�@�e�X�e�B�b�N�̓������ǂ̂悤�ɂ��ău���[�h�ɓ`��邩�Ƃ����ƁA�}�X�g�i�v���y���V���t�g�ɑ����j���X���b�V���v���[�g�Ƃ����̂��Q�������āA�X�e�B�b�N����̑���ŁA���ɂ��܂��u���[�h�𑀍삵�Ă��܂��B�@�X���b�V���͐���������Ⴂ�����Ǝ����ɂ���̂ŁA�Ӗ����킩�肩�˂܂����A�}�X�g���ɂӂ��~���ʂ��Ă����āA�x�A�����O���ړ_�ɂȂ��Ă��܂��B���̉~�ɃX�e�B�b�N����^����`����ƁA���ɑ��Ď��R�ɌX���܂��B���ꂪ�x�A�����O����ď�̉~�ɓ`���A�u���[�h�̃s�b�`�p��ς���d�g�݂ł��B
�@���M�ɒ��a10�������炢�̉~�Ղ������݁A�~�Ղ̒[�������Ď߂ɓ������Ƃ��������z�����Ă��������B�@�b���r�ɂȂ���X���b�V�����X���C�x�������N�ƌĂсA�X���C�׃��Ƃ͂��傤�lj�]�ؔn�̂悤�ɉ~�Ղ�g�ł����Ȃ���Ă���ƍl����悢�ł��傤�B���̓����Ńu���[�h�̌㉏������ʒu�ɗ������ɉ�������グ���肵�Ă���킯�ł��B
�@���Ȃ����������Ղ�����ł����A���̕��G�ȃ��[�^�[���c���Ŋȗ��ɐ�������̂́A���ɂ͂��ꂪ���E�ł��B
����
collective pitch lever
cyAHic pitch stick
swash plate
swivel link
�@
��32-7�@���[�^�[�s�b�`�ւ̓`�B�@�\�ɂ��ā@�e�`300����
�w���̋@�\�I�Șb
�V���N���i�C�Y�E�E�E�������O�ɖ^���[�J�[�̃X���b�V���v���[�g�t�߂����Ă݂܂��傤�I
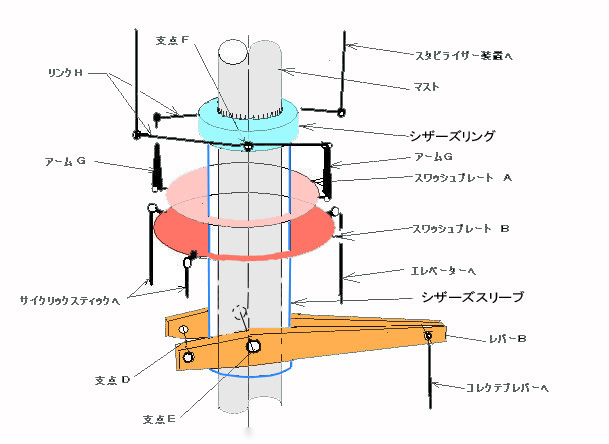
�@��}�͑�܂��ȍ\���ł��B�@
�@�X���b�V���v���[�g�a�́A���[�^�[�̉�]�ʂ��X���邽�߂ɁA�ǂ̕����Ƀs�b�`�̋����t���邩�T�C�N���b�N�X�e�B�b�N�𑀂鑀�c�m�̈ӎv��`����Ƃ���B
�@�X���b�V���v���[�g�`�̓x�A�����O����ăX���b�V���v���[�g�a�̏��𐳒��Ƀg���[�X���܂��B
�@�����A���̃X���b�V���v���[�g�`�͉�]���܂��B���[�^�[���}�X�g�ƈꏏ�̉�]�����܂��B
�@���̏�ɃV�U�[�Y�����O������܂��B����͂ƂĂ���Ȗ�ڂ����Ă��܂��B�V�U�[�Y�X���[�u�Ƃ����}�X�g�̊O���ɂ��Ԃ��Ă���`���[�u�̏�ɓ���ȃx�A�����O����ĕt���Ă��܂��B�V�U�[�Y�X���[�u������ɐL�т��������}�X�g�̉�]�ɘA������̂ł��B�B
�@�}�X�g���ɂ̓Z���[�V�����Ƃ����s�j�I���M�A��̎R���������ɍ���ł���A�V�U�[�Y�����O�����ɍ��܂ꂽ�a�Ɗ��ݍ����̂ł����A�������ɃX���C�h����l�ɂȂ��Ă��܂��B
�@�V�U�[�Y�X���[�u�̓��o�[�a�ɂ��V�U�[�Y�����O���㉺�����܂��B
�@���o�[�a�̎x�_�c�̓P�[�X�i�}�ł͏ȗ��j�Ɍq����A�X���b�V���v���[�g�`�a���Q���̃s���ł��̃P�[�X�Ɍq�����Ă��܂��B
�@�X���b�V���v���[�g�`�́@�������A�[���f����ăV�U�[�Y�����O�̉�]�A�܂�}�X�g�̉�]���`�����Ă��܂��B
�@���āA�����
�@�T�C�N���b�N�X�e�B�b�N��O�ɓ|���ƁA�X���b�V���v���[�g�a�̑O�����Q�{�̃��b�h��������O������������܂��B
�@����ƃX���b�V���v���[�g�`����]���Ȃ���ꏏ�ɑO������Ł@�A�[���f���O�����ɗ���Ɖ��Ɉ��������ɍs���Ə�ɉ����グ���܂��B���ꂪ�V�U�[�Y�����O�̎x�_�e�ɕt���Ă��郊���N�g�����@�}�X�g�㕔�ɂ��Ă���X�^�r���C�U�[���u�ɓ`���@��������ā@���[�^�[�u���[�h�̃s�b�`��ς������܂��B
�@�����ɃR���N�e�B�u�s�b�`���o�[�������グ��ƃ��o�[�a�������グ�܂��B�܂�V�U�[�Y�X���[�u�ƈꏏ�ɃV�U�[�Y�����O����ɉ����グ�܂��B�X�^�r���C�U�[���u�֏オ���Ă��郍�b�h�͍X�ɏ�ɉ����グ����E�E�E
�E �E�E�ւ��H�@������?
���ꂩ���́@�w���ɏڂ������ɕ����ĉ������B
�@���āA�V���N���i�C�Y�@�X�C�~���O�E�E�E�H�ł͂Ȃ��@�G���x�[�^�[�̘b�ɖ߂��܂��B
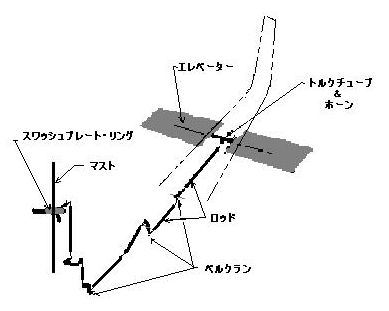
�@����̃X���b�V���v���[�g�����O�a�̌���ɕt���Ă��郍�b�h���}�̂悤�ɓ��̂���e�[���u�[�� ���𑖂�G���x�[�^�[�̃z�[���Ɍq�����Ă��܂��B
�@�r���Ɂ@�������̃x���N�����N���o�R����̂ł����A�Ō�̃x���N�����N��������ƋȎҁE�E�E�p�e���g�����H
�@(�G�b�Z�C�P�S�̒����Ɏʐ^������܂����ˁI�E�E���ꂪ�q���g�ł�)
�@���̂����Ȃ��Ă���̂����J���}�Z���̂ŁA�����ł͏ȗ����܂��B�����鎖�́@�u�X���b�V���v���[�g�̑O��̌X���ɘA�����Ă���v���Č������ł��B
���Ȃ݂Ɂ@�T�C�N���b�N���R���N�e�B�u�s�b�`�������ŃA�V�X�g����Ă܂��B
�w�����@���[���E�E�E�ł�
��32-8�@���OH-1�̃X�^�r���[�^�ɂ��ā@����������
�@�͂��߂܂��āA�}�[���₶����̂a�a�r���烊���N��H���Ă���Ă��܂����B
�@�V���N���i�C�Y�h�E�G���x�[�^�̋L���A�����[���q�������Ă��������܂����B
�@���̒��� ��32-3�@FA300����̃V���N���i�C�Y�h�G���x�[�^�[�̎w�E�ɁA�u���E�̃G���x�[�^�[�̓g���N�`���[�u�P�{�Ōq�����Ă��܂��@����Ƀz�[�����t���Ă���Ƀ��b�h���P�{�q�����ăe�[���u�[���̒��𑖂��ăT�C�N���b�N�̃����N�Ɍq�����Ă��܂��B�����OH-1�������ł��B�v
�Ƃ���܂����A���������ɂ��܂��ƁAOH-1�Ɋւ��Ă͈Ⴄ�悤�ł��B
�@�܂��AOH-1�̂́u�X�^�r���[�^�v�ƌĂ�ł��܂��B
�@����@�ł́A�t���C�o�C���C���ɂ���đC���x�ƃR���N�e�B�u�s�b�`���o�[�ʒu�ɉ����ĂS�O�x�i�z�o�����O���j�`�|�Q�O�x�i�I�[�g�����j�͈̔͂Ńt���I�[�g�œ����Ă��܂����B
�@�c�T�C�N���b�N�ʒu�Ƃ͒��ڂ͘A�����Ă��܂��A���J�j�J���Ɍ�������Ă͂��܂���ł����B�d�C�M���Ŗ����A�N�`���G�[�^�ɂ�蓮�����Ă�����ł��B
�@�������A�c�T�C�N���b�N�ʒu�́A�T�ˑC���x�Ɣ�Ⴕ�Ă��܂��̂ŁA�ԐړI�ɂ͘A�����Ă���ƌ����Ă����������m��܂���B
�@��������Ƃ����ړI�́A���̂Q�_�ł��B
�@�@���x�ɂ���ēK�ȃs�b�`�p�������o�����߁i�z�o�����O���ɉߑ�ȃs�b�`�グ�ɂȂ�Ȃ��悤�ɁA�܂�������s���ɂ͂قڐ����p���ɂȂ�悤�ɂ���j
�A�@�����Ȃ鑬�x��ł��K�ȏc���萫����������i�X�e�B�b�N�������@�����葝������A�����@�オ�茸�������������������j�@�������A�����X�`�P�P�N�x�Ɏ��{������s�����̌��ʁAOH-1�̃X�^�r���[�^�͌Œ�Ƃ��Ă����̔�s�����͖������ׂ����̂ł��邱�Ƃ��킩��A�ʎY�@����͌Œ�Ƃ���܂����B
�@
�@���@��Ƃ��ẮA�V�R���X�L�[��UH�^SH-60�A�{�[�C���OAH-64���A��͂�t���C�o�C���C���ō쓮����X�^�r���[�^���̗p���Ă��܂��BOH-1�Ɠ����悤�ɁA��S�O�`�|�Q�O�x�ʂ͈̔͂œ����܂��B
�@�܂��A���J�j�J���Ɍ������ꂽ�G���x�[�^�Ȃ�A�A�O�X�^�`�P�O�X���̗p���Ă��܂��B
�@�w���R�v�^�[��������������̂́AOH-1���������Ă����ړI�ŏ������悤�ɁA
�@�@���x�ɂ���ēK�ȃs�b�`�p�������o�����߁i�z�o�����O���ɉߑ�ȃs�b�`�グ�ɂȂ�Ȃ��悤�ɁA�܂�������s���ɂ͂قڐ����p���ɂȂ�悤�ɂ���j
�A�@�����Ȃ�K�ȏc���萫����������i�X�e�B�b�N�������@�����葝������A�����@�オ�茸�������������������j
�Ƃ������ƂŁA���̖ړI�͋@��ɂ�炸�ς��Ȃ��Ǝv���܂��B
�@�w���R�v�^�[�̔����́A���C�����[�^�[�̃_�E���E�H�b�V���̕��G����ȗ���A���̂̌㗬�̗��ꂽ����ɂ��炳��邽�߁A���O�̌����ɂ��v���悭�n�Y����ꏊ�ł��B
�@���̂��߁A��s�������n�܂��Ă��炵���Ή��C����A�`�Ԃ��ς�邱�Ƃ��{���ɂ悭����܂��B
�@�Ⴆ�Ώ㏸���A�y�э~�����Ȃǂɓ��قȎp���ω��Ȃǂ��������Ă��܂��ꍇ��A�ُ�ȐU���E�h������������ꍇ�Ȃǂ�����܂��B
�@���̂��߁A�@��ɂ���Ė{���ɗl�X�ȍH�v�����Ă��܂�
�E�@�X�^�r���[�^�ɃX���b�g��t������i�s���[�}�j
�E�@�O���ɃG�b�W�𗧂Ă���i�h�[�t�@���j
�E�@�L�����o�[�t���̗��^�ɂ�����
�E�@�㉏�ɃK�[�j�[�t���b�v�ƌĂ������Ă𗧂Ă���i�h�[�t�@���AMD900���̑��j
�E�@���ɂ�����i�x��47�AH-1�A�A�O�X�^A109�AAH-64�AH-60�j
�E�@��������̎�t�ʒu��������iH-53�AAH-64�AH-60�A�^�C�K�[�A�R�}���`etc�j
���̑����@��ɂ���ėl�X�ł��B
�Ȃ��A�ȉ��̕������Q�l�ɂ��܂����B
Aiba, M., Kataoka, T., Tobinaga, Y., The Flight Control System of The �V Observation Helicopter (XOH-1), Proceedings of AHS International Meeting on Advanced Rotorcraft Technology and Disaster Relief, Gifu, Japan, 1998. Aiba, M., Tsukiji, T., Kataoka, T., Fujigaki, T., The Flight Test Results of the �V Observation Helicopter (XOH-1), Proceedings of 56th AHS Annual Forum, 1998.
�Љ�,����,����,�e�r,��i,�i�R,�V���^�ϑ��w���R�v�^�[�iXOH-1�j�̎���-��s����v, ��R�U���s�@�V���|�W�E���u���W, 1998.
����,�ˏ�,����, XOH-1�̐v�y�ю���-��s����(��s����), ��R�W���s�@�V���|
�W�E���u���W, 2000.
�@
�@ |
�@